装配工序
在大多数人的观念里,制造生产中的装配环节是一项偏低端的劳动密集型工作,其技术含量低,是制造过程中的个最后一步,不过是“拧螺丝”的简单体力劳动。实际上,装配早已超越了“拧螺丝”的简单概念,它是制造业的核心环节之一,是一个决定产品质量、成本和效率的综合性技术环节。
随着现代产品的复杂度以及装配精度要求不断升高,装配工作越来越复杂,为了提高产品的一致性和生产效率,制造企业也在不断提高装配工艺,逐步往自动化的方向发展。在高度定制化的今天,消费者需求日益个性化、多样化。这使得产品的生命周期大幅缩短,更新换代速度极快,因此,企业需要能够在同一条生产线上,快速、低成本地生产组装出不同型号、不同配置的产品。传统的“刚性”自动化生产线,专为单一产品的大规模生产设计,换产时需要长时间的停线和重新调试,无法适应这种快速变化的市场。装配协作机器人因此诞生。

装配协作机器人
装配协作机器人,顾名思义,是专门用于执行装配任务的协作机器人,是以协作机器人作为主体,在其末端根据不同的装配任务需要安装上不同的装配系统,其核心组成部分有:
- 机器人本体:通常为6轴关节型臂展,模仿人类手臂,提供高度的灵活性,同时,有着高重复定位精度(如±0.02mm或更高),能确保每一次动作都能精准到位。
- 智能控制器:机器人的“大脑”,负责运动规划、指令解析和与外部设备通信。
- 末端执行器:机器人的“手”,根据任务不同而定制,如电动伺服夹爪、真空吸盘、拧螺丝刀、点胶阀、视觉相机等。
- 传感器系统:机器人的“感官”,主要包括:1、力/力矩传感器:安装在腕部,用于感知装配过程中的微小力变化,实现“柔顺控制”;2、2D/3D视觉系统:作为机器人的“眼睛”,用于识别、定位和检测零部件。
装配协作机器人完成一个任务,是一个集感知、决策、执行于一体的闭环过程。典型工作流程如下:
- 感知与识别:视觉系统首先对工作台上的杂乱零件进行拍照。通过图像处理算法,识别出目标零件的类型、位置和方向。例如,确认螺丝孔在哪里,或者哪个零件是需要被抓取的。
- 规划与定位:控制器根据视觉系统提供的坐标信息,计算出机器人移动到抓取点的最优路径。机器人运动到零件上方,准备抓取。
- 抓取与搬运:末端执行器(如夹爪或吸盘)执行动作,稳定地抓取零件。机器人沿着规划好的轨迹,将零件搬运到目标装配位置。
- 精装配与力控:这是最核心的环节。机器人依靠力/力矩传感器进行“柔顺装配”。以插入轴套为例:机器人不是硬性地将轴压入套中,而是在接触时持续监测受到的阻力。一旦发现阻力异常(如卡住),它会进行微小的“晃动”或“搜索”动作,同时保持恒定的下压力,直到轴顺利插入到位。这个过程完美模拟了熟练工人的“手感”。
- 反馈与循环:完成一个步骤后,机器人会向总控系统发送“完成”信号。然后移动到下一个位置,或等待下一个指令,开始新一轮的装配循环,直至整个产品装配完成。
装配协作机器人的优势
当下制造企业面对核心矛盾是市场对“个性化、快速迭代”产品的需求与 “成本、效率和质量稳定性” 之间的巨大张力。传统大规模生产和传统自动化无法解决这个矛盾,而纯人工生产则在成本和质量上难以为继。装配协作机器人恰恰位于这个矛盾的交点上,并提供了完美的解决方案,是未来制造的必然选择,详细来说,装配协作机器人有如下核心优势:
- 极致的柔性生产传:传统工业机器人安装需要数月,产品换型时,调试工作量大、耗时长。相比之下,协作机器人通常可在几小时或几天内完成部署。通过拖拽示教、图形化编程界面,普通工人经过简单培训即可完成新任务的设置和程序修改。这使得生产线能够快速在不同产品型号之间切换。
- 敏捷响应能力,适应小批量、多品种趋势:现代市场(如3C、小家电、医疗器械)产品生命周期短,定制化需求高。协作机器人允许企业以低成本、高效率的方式实现“混线生产”,在同一工位上完成多种不同产品的装配任务,完美应对“大规模定制”的挑战。
- 开创性的人机协作与安全保障:内置的力/力矩传感器和碰撞检测技术,使机器人在与人类发生意外接触时能够立即停止或减缓运动,极大降低了伤害风险。这意味着机器人可以直接部署在工人身边,共享工作空间。
- 低成本与高回报:协作机器人本体成本通常低于传统工业机器人使得初始投资低;并且轻量化设计使其易于安装,甚至可以直接安装在普通工作台上,无需改造地面,后续的使用和维护成本也低,由于上述成本优势,以及它带来的效率提升、质量稳定和人力节省,装配协作机器人的投资回收周期通常非常短。
- 精密装配与质量一致性:通过力/力矩传感器,机器人可以实现柔顺装配,在插入轴套、安装卡扣等场景中,能感知微小的阻力并实时调整姿态,避免卡死或零件损伤,因此保证工艺质量,可以精确控制力度和力矩,确保每一次操作的工艺参数都完全一致,杜绝过紧或过松。

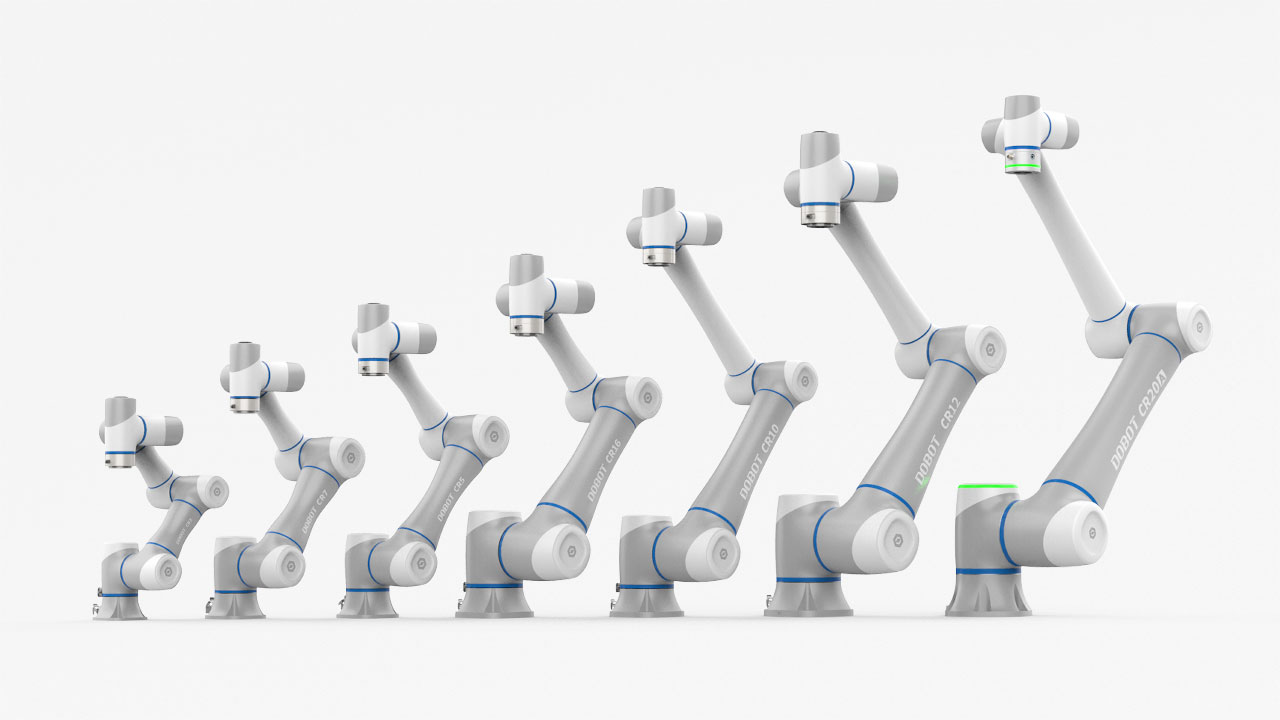
越疆CRA系列协作机器人
作为国内协作机器人的领头羊,越疆CRA系列协作机器人专为现代制造业对柔性化、智能化和高精度的需求设计,在制造装配环节表现相当出色,其具体表现如下:
- 以极致精度与稳定性保障质量:通过优化精度控制算法和振动抑制技术,CRA系列实现了±0.02mm的重复定位精度,并将高速运动下的抖动控制在0.3mm以内。这意味着在装配过程中,机器人能始终保持稳定可靠,直接提升产品的一致性和良品率。
- 以人机协同与柔性生产提升效率:CRA系列无需安全围栏即可与人并肩工作,其拖拽示教和图形化编程功能让产线工人也能快速调试。当生产任务需要切换时,机器人能迅速调整以适应新工艺,满足 “小批量、多品种” 的柔性生产需求。
- 以模块化与开放生态降低应用门槛:CRA系列提供从3kg到20kg的多种负载型号,丰富的I/O接口和对主流工业总线协议的支持,使其能像积木一样轻松集成到现有生产线中。这种模块化、即插即用的理念,显著降低了自动化升级的复杂度和成本

基于上述能力,CRA系列在多个制造领域的装配环节中表现出色:
- 3C电子装配:凭借 ±0.02mm 的重复定位精度,CRA系列能胜任PCB板贴标、喷码、螺丝锁付等精密工作。其高精度和稳定性有效保证了像电路板、手机中框等微小部件装配的高良品率。
- 汽车零部件装配:在汽车油管接头等部件的装配中,CRA系列机器人不仅能快速精准地完成上下料,避免人工出错,其高灵敏碰撞检测和安全皮肤技术更能确保与人协同时的绝对安全。
- 精密部件与复合装配:对于轴承、齿轮、轴套等精密部件,CRA系列能实现微米级防抖,确保装配的稳定可靠。此外,它还能与AGV小车组合成复合机器人,构建柔性装配单元,实现物料在工位间的自动搬运和精准装配。

综上所述,装配协作机器人以其极致的柔性生产能力、敏捷的响应速度、开创性的人机协作模式、低成本高回报的投资效益以及精密装配与质量一致性等核心优势,正逐步成为未来制造业不可或缺的关键力量。面对市场对个性化、快速迭代产品的迫切需求,装配协作机器人不仅能够有效解决成本、效率与质量稳定性之间的矛盾,更将推动制造业向更加智能化、灵活化的方向迈进,开启制造业的新篇章。









 汽车制造
汽车制造
 3C电子
3C电子
 金属加工
金属加工
 新零售
新零售
 食品饮料
食品饮料
 化工
化工
 医疗手术
医疗手术
 半导体
半导体
 科研
科研
 教育
教育
 自动化焊接
自动化焊接
 码垛
码垛
 上下料
上下料
 无序分拣
无序分拣
.svg) 点涂胶
点涂胶
 视觉检测
视觉检测
 装配
装配
 搬运
搬运
 PCB 插件
PCB 插件
 打磨抛光
打磨抛光
 螺丝锁付
螺丝锁付


