3C制造中的动脉—“搬运”与“码垛”
在大多数人看来,搬运和码垛仅仅是简单的“体力活”,与核心的研发、精密组装相比,似乎无足轻重。然而,在高度竞争、利润微薄且更新换代极快的3C制造业中,这两个环节实际上是连接所有生产环节的“动脉”与“骨架”,其重要性怎么强调都不为过。生产线的节拍(生产节奏)直接决定了工厂的产出能力。搬运和码垛是贯穿原材料、零部件、半成品到成品的全程活动,影响生产流水的连续性,流畅的搬运是保证生产流水线不间断的核心。

如今,3C数码产品更新节奏越来越快,有着“快时尚”化的趋势,这对其制造生产也产生了深远的影响,传统生产模式是大批量、少批次,产品生命周期长,产线固定很少调整,成本靠规模效应;到如今的小批量、多批次,产品生命周期短,型号快速切换,产线需频繁重组、调整,成本靠速度和效率。这些转变对生产制造“搬运”和“码垛”这两个环节提出了新的要求:
- 快速换线与重构能力:搬运和码垛系统必须能适应频繁的产品更迭。今天生产手机,明天可能就要生产智能音箱。产线布局需要随时调整,搬运机器人(如AGV/AMR)的路径、码垛机器人的抓取对象和堆叠模式都必须能通过软件“一键切换”。
- 处理复杂多样物料的能力:3C产品迭代快,意味着零部件、半成品和成品的规格、尺寸、重量变化频繁且多样。搬运和码垛系统不能只为单一产品设计,必须具备处理“混产”和“乱序”供料的能力。
- 极高的部署与调试速度:企业无法承受因设备安装调试而导致的漫长停产。新的物流设备必须具备“即插即用”和快速部署的能力。
- 无缝衔接的信息流:搬运和码垛不再是独立的物理动作,而是需要与上层管理系统(如MES制造执行系统、WMS仓库管理系统)深度集成。系统需要知道“什么时候、从哪里、搬运什么、到哪里、以什么方式码放”。
传统3C制造中的搬运与码垛所面临的挑战
传统的数码生产制造厂商多依赖于传统的工业机器人来实现自动化的目的,但在面对以上的新要求时,显得有些捉襟见肘,主要在以下方面表现不足:
- 柔性生产适配不足:产线调整困难,传统机器人路径/程序更改耗时,难以适应“小批量、多品种”生产,应对一机多产品、一机多盘、一机多线等情况时能力有限。
- 技术性能存在局限:传统码垛机器人抓手可能结构复杂、动作速度慢,且易受工作环境温度和工件重量影响,机器人臂存在工作死角,工作角度受限,感知能力弱,无法快速识别频繁变换的产品。
- 成本与部署压力:初始投资及后续维护、编程成本高,传统工业码垛系统部署复杂,缺乏柔性,难以迅速调整。
- 集成与智能化程度低:传统机器人难以快速准确识别和抓取多样化的物品,需要针对不同的物品设计特定的抓手,多数传统机器人是独立的自动化孤岛,数据难以集成到智能制造系统。

为应对上述挑战,制造业和科技界也在积极探索新的解决方案,快速迭代的行业特征正倒逼3C数码生产物流环节进行深刻变革。核心在于通过引入柔性自动化设备和一体化智能系统,打造一个能够快速响应变化、同时保障效率与质量的敏捷生产体系,而协作机器人是目前行业中普遍的选择之一。
搬运协作机器人
相较于传统工业机器人的刚性生产,协作机器人凭借其安全、灵活、易用的天然基因,正成为推动数码制造转型升级的关键力量。目前,行业普遍的做法是将协作机器人与 AGV 集成的移动复合机器人,全面增强了机器人的移动作业能力,灵活执行物料搬运、转运、等复杂任务,实现更高效的无人化、智能化、柔性化生产,具体来说有以下的生产优势:
- 极致柔性,应对“小批量、多品种”的生产模式:快速部署与重新编程:传统工业机器人部署一条新产线或更换产品品种,可能需要数周时间进行编程、安装安全围栏和调试。而协作机器人通常具备图形化编程界面,通过平板电脑或示教器进行块状图编程,直观易懂。拖拽示教:操作员可以直接握住机器人手臂,引导它完成一套动作路径,机器人会自动记录学习。这使得产线换型时间可以从“周”缩短到“小时”甚至“分钟”。灵活的产线布局:协作机器人自重轻、体积小,可以轻松地在车间内移动,部署在流水线、工作台甚至AGV小车上,形成“移动工作站”,实现真正的柔性产线单元。
- 人机协作,发挥“人”与“机”的各自优势:将重复性、高精度或枯燥的工作交给机器人,而将需要复杂判断、灵活性和创造力的工作留给人(如最终质检、复杂线缆处理、程序调试)。这种模式既提升了整体效率,又降低了工人的劳动强度和职业伤害。其次,空间共享,提高利用率,无需庞大的安全围栏,协作机器人可以与人在同一空间内紧密工作。当机器人遇到阻力(通过力觉传感器)时会自动停止,确保了人员安全。这极大地节约了生产空间,对于租金昂贵的工厂来说意义重大。

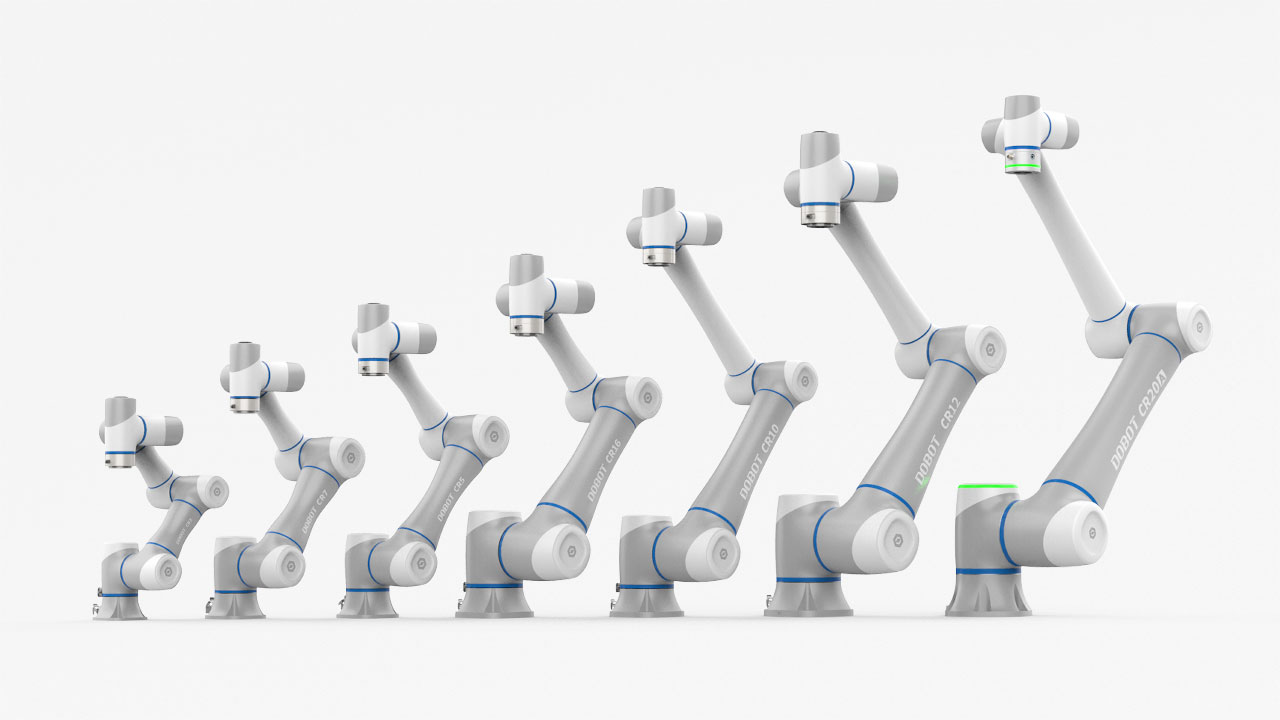
越疆协作机器人CRA系列在搬运和码垛方面的优势
越疆作为中国协作机器人第一股,不断在协作机器人领域推陈出新,最具代表性的CRA系列协作机器人针对3C数码行业的生产特点,给数码生产的搬运和码垛环节带来了显著的优势,产品矩阵覆盖面广,负载范围从3KG到30KG,精度从±0.02mm涵盖到了±0.1mm,解决了行业长期面临的 “大负载”与“高速度”不可兼得 " 的痛点。具体来说有以下核心优势:
- 效率与性能:CRA系列关节最大速度223°/s,重复定位精度 ±0.02mm,码垛节拍可达10箱/分钟,这使得生产效率显著提升,满足3C行业对高精作业的需求,单机效率较同类提升20%
- 精度与稳定:得益于CRA系列的复杂运动下的绝对定位精度0.2—0.4mm,振动抑制算法使得高速下抖动<0.3mm,电磁抱闸断电后末端下落<1mm ,这都保障精密元件搬运安全、高速运行下依然平稳并防止意外断电损伤产品。
- 安全协作:在CRA系列的基础上搭载安全皮肤技术,可以15cm内感知障碍,并能10ms内快速响应,实现"碰前停止无需物理围栏,人机近距离安全协作,兼顾安全与效率,无需降速运行。
- 柔性适配:CRA系列安全协作机器人双线双边作业模式,支持正装、侧装、倒装,并且支持图形化编程,快速部署,这些都使得CRA协作机器人可以单个工作站服务双线,效率提升3倍,适应紧凑空间,提升空间利用率,产线调整时,快速切换任务。

越疆CRA系列的特性直击3C数码制造业的核心痛点:面对手机、平板、智能穿戴设备及其零部件,它能提供高精度且柔和的搬运。面对电池模组、金属中框等较重部件,它的大负载能力游刃有余,例如CR30H,在突破大负载30kg的同时,仍保持重复定位±0.05mm的精度。当产线需要为新品进行调整时,它的柔性部署和快速编程能力能最大限度缩短准备时间。除了搬运和码垛这两项粗糙活,CRA系列是复杂工艺的可靠执行者,凭借着高精度和稳定性,它还能够执行手机涂胶等工作,在3C数码行业外更是大放光彩,例如:在芯片行业中能够胜任晶圆的封装,金属加工行与汽车制造领域中可以胜任激光切割以及CNC机床的上下料工作。

在当今3C数码制造领域,搬运和码垛早已超越了单纯的“体力劳动”范畴。它们是直接影响生产效率、成本控制、产品质量和柔性化能力的关键战略环节。投资和优化这些环节,不再是“可选项”,而是在激烈竞争中生存与发展的“必选项”。而引入协作机器人不仅仅是购买一台自动化设备,更是为生产线引入了一位能够适应多种任务、快速响应生产变化的多面手,能够有效提升产线的综合效率、自动化水平和柔性化能力。










 汽车制造
汽车制造
 3C电子
3C电子
 金属加工
金属加工
 新零售
新零售
 食品饮料
食品饮料
 化工
化工
 医疗手术
医疗手术
 半导体
半导体
 科研
科研
 教育
教育
 自动化焊接
自动化焊接
 码垛
码垛
 上下料
上下料
 无序分拣
无序分拣
.svg) 点涂胶
点涂胶
 视觉检测
视觉检测
 装配
装配
 搬运
搬运
 PCB 插件
PCB 插件
 打磨抛光
打磨抛光
 螺丝锁付
螺丝锁付


